警告
記事内に激しい光の点滅を伴うGIF画像を掲載しています。
ご注意ください。
使用したモノ
- Arduino Uno R3 (互換機) 1個
- ジョイスティックモジュール 1個
- LEDリングモジュール 1個
- ジャンパー線 10本
- ブレッドボード 1個
環境
Arduino IDE 2.3.4
使用ライブラリ
Adafruit_NeoPixel 1.12.3
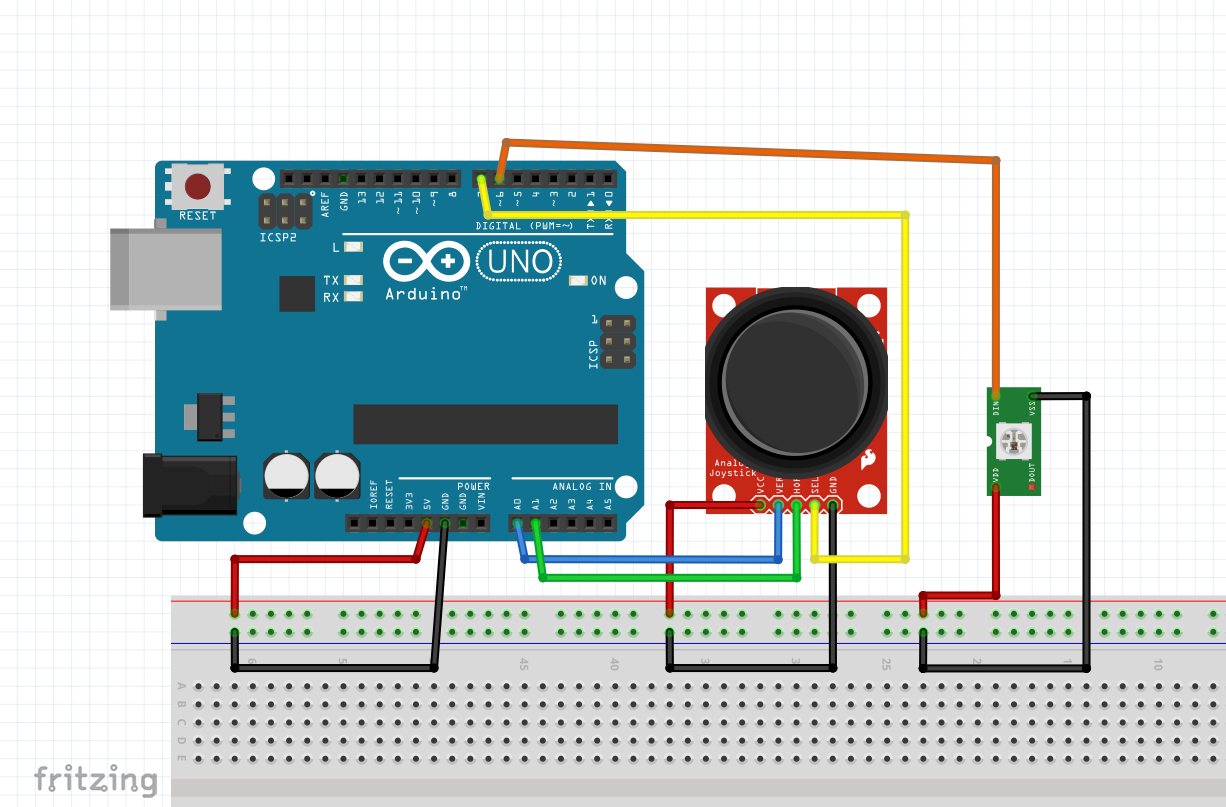
配線
それぞれのモジュールの接続方法は変わりません。
ブレッドボードがあると電源部分の接続が楽です。

 Blender
Blender  Android
Android  Blender
Blender  Blender
Blender  Blender
Blender  Blender
Blender  Blender
Blender  Blender
Blender  Blender
Blender  3Dプリント
3Dプリント  Blender
Blender  Blender
Blender  Blender
Blender  Blender
Blender  Blender
Blender  Blender
Blender  Blender
Blender  Blender
Arduino
Blender
Arduino警告
記事内に激しい光の点滅を伴うGIF画像を掲載しています。
ご注意ください。
Arduino IDE 2.3.4
Adafruit_NeoPixel 1.12.3
それぞれのモジュールの接続方法は変わりません。
ブレッドボードがあると電源部分の接続が楽です。


コメント